For up-to-date information, visit my ASU lab website by clicking on the lab logo below:
I am an Assistant Professor in Computer Science at Arizona State University. Previously, I was a postdoctoral scholar in
Computer Science at Stanford University working with Prof. Carlos Guestrin (Fairness, Algorithmic Bias, and Explainable ML Group),
Prof. Emily Fox (Time Series Group), and Prof. David Scheinker (Systems Utilization Research for Stanford Medicine).
I also worked at the Stanford Intelligent Systems Laboratory (SISL) in the Aeronautics & Astronautics Engineering Department with
Prof. Mykel Kochenderfer. While at SISL, I collaborated with Prof. Mac Schwager and Prof. Marco Pavone on robustness of autonomous systems.
I completed my PhD in Computer Science in Prof. Fabio Ramos' lab (Robot Learning and
Machine Learning Group) at the School of
Computer Science in the University of Sydney. I grew up in
Sri Lanka.
News
- August'23 - I started as an Assitant Professor in Computer Science at
Arizona State University (ASU). I am accepting PhD students with a background in machine learning, robotics, computer vision, or natural language processing.b
B. Charpentier, R. Senanayake, M. Kochenderfer, and S. Günnemann
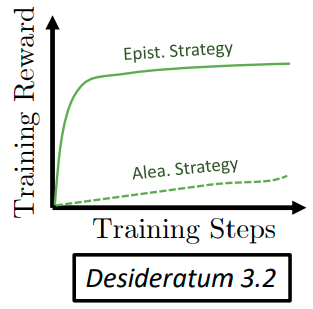
Disentangling Epistemic and Aleatoric Uncertainty in Reinforcement Learning
@inproceedings{Charpentier2022arxiv,
author = {Charpentier, Harrison and Senanayake, Ransalu and Kochenderfer, Mykel and Günnemann, Stephan},
title = {Disentangling Epistemic and Aleatoric Uncertainty in Reinforcement Learning},
booktitle = {},
year = {2022},
volume = {},
pages = {},
}
Disentangling Epistemic and Aleatoric Uncertainty in Reinforcement Learning
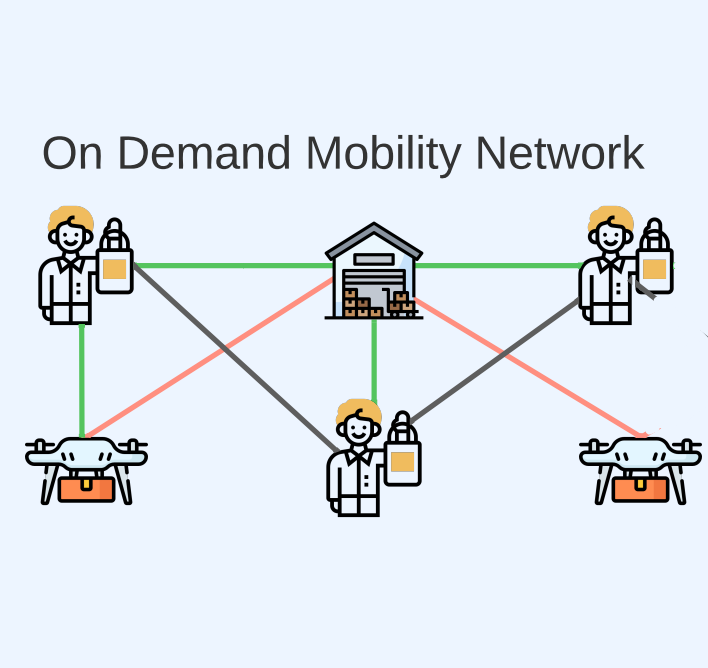
Graph Attention Multi-Agent Fleet Autonomy for Advanced Air Mobility
@inproceedings{Fernando2023arxiv,
author = {Fernando, Malintha and Senanayake, Ransalu and Choi, Heeyoul and Swany, Martin},
title = {Graph Attention Multi-Agent Fleet Autonomy for Advanced Air Mobility},
booktitle = {Robotics: Science and Systems (RSS)},
year = {2023},
volume = {},
pages = {},
}
Robotics: Science and Systems (RSS) Conference,
Daegu, 2023
D. Asmar, R. Senanayake, S. Manuel, and M. Kochenderfer
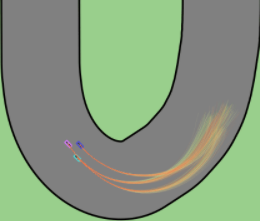
Model Predictive Optimized Path Integral Strategies
@inproceedings{Asmar2022arxiv,
author = {Asmar, Dylan and Senanayake, Ransalu and Manuel, Shawn and Kochenderfer, Mykel},
title = {Model Predictive Optimized Path Integral Strategies},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2023},
volume = {},
pages = {},
}
International Conference on Robotics and Automation (ICRA),
London, 2023
H. Delecki, M. Itkina, B. Lange, R. Senanayake, and M. Kochenderfer
How Do We Fail? Stress Testing Perception in Autonomous Vehicles
@inproceedings{Delecki2022arxiv,
author = {Delecki, Harrison and Itkina, Masha and
Lange, Bernard and Senanayake, Ransalu and Kochenderfer, Mykel},
title = {How Do We Fail? Stress Testing Perception in Autonomous Vehicles},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS)},
year = {2022},
volume = {},
pages = {},
}
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Kyoto, 2022
O. Peltzer, A. Bouman, S-K. Kim, R. Senanayake, J. Ott, H. Delecki, M. Sobue, M. Kochenderfer, M. Schwager, J. Burdick, and A. Agha-mohammadi
FIG-OP: Exploring Large-Scale Unknown Environments on a Fixed Time Budget
@inproceedings{Peltzer2022arxiv,
author = {Peltzer, Oriana and Bouman, Amanda, Kim, Sung-Kyun, Senanayake, Ransalu and Ott, Joshua and Delecki, Harrison, Sobue, Mamoru, Kochenderfer, Mykel J. and Schwager, Mac and Burdick, Joel and Agha-mohammadi, Ali-akbar},
title = {FIG-OP: Exploring Large-Scale Unknown Environments on a Fixed Time Budget},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS)},
year = {2022},
volume = {},
pages = {},
}
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Kyoto, 2022
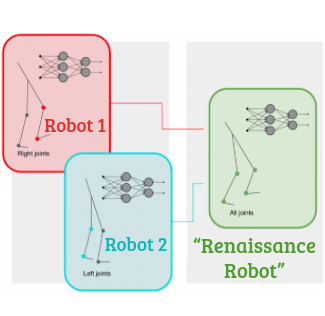
J. Tan, R. Senanayake, and F. Ramos
Renaissance Robot: Optimal Transport Policy Fusion for Learning Diverse Skills
@inproceedings{Tan2022arxiv,
author = {Tan, Julia and Senanayake, Ransalu and Ramos, Fabio},
title = {Renaissance Robot: Optimal Transport Policy Fusion for Learning Diverse Skills},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS)},
year = {2022},
volume = {},
pages = {},
}
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Kyoto, 2022
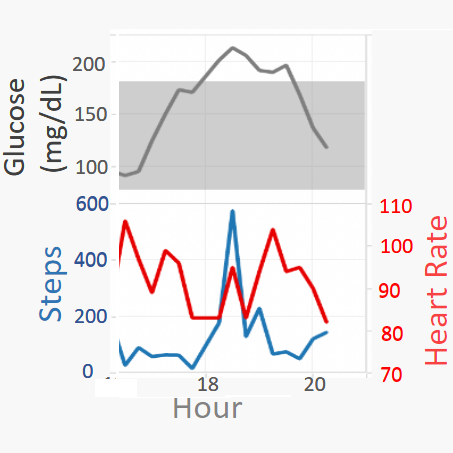
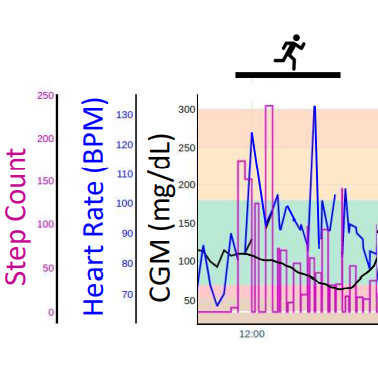
R. Senanayake, J.O. Ferstad, I.Thapa, F. Giammarino, M. Vasu, D. Zaharieva, P. Prahalad, D.M. Maahs, D.N. Rosenthal, F. Rodriguez, N. Bambos, D. Miller, A. Shin, S.J. Roth, C. Guestrin, E.B. Fox, and D. Scheinker
A Platform for the Personalized Management of Diabetes and Cardiovascular Disease at Population Scale With Data From Multiple Sensors
@inproceedings{Senanayake2022AHA,
author = {Senanayake, Ransalu and Ferstad, Johannes O and Thapa, Isha and Giammarino, Flavia and Vasu, Megana and Zaharieva, Dessi, and Prahalad, Priya and Maahs, David M and Rosenthal, David N and Rodriguez, Fatima and Bambos, Nicholas, Miller, Daniel and Shin, Andrew, and J Roth, Stephen and Guestrin, Carlos and Fox, Emily B, and Scheinker, David},
title = {A Platform for the Personalized Management of Diabetes and Cardiovascular Disease at Population Scale With Data From Multiple Sensors},
booktitle = {American Heart Association Scientific Sessions (AHA)},
year = {2022},
volume = {},
pages = {},
}
American Heart Association Scientific Sessions (AHA), Chicago, 2022
D.P. Zaharieva, R. Senanayake, C. Brown, B. Watkins, G. Loving, P. Prahalad, J.O. Ferstad, C. Guestrin, E.B. Fox, D.M. Maahs, and D. Scheinker
Adding Glycemic and Physical Activity Metrics to a Multimodal Algorithm-Enabled Decision-Support Tool for Type 1 Diabetes Care: Keys to Implementation and Opportunities
@inproceedings{Zaharieva_2022_1,
author = {Zaharieva, D. and Senanayake, R. and Brown, C. and Watkins, B. and Loving, G. and Prahalad, P. and Ferstad, J.O. and Guestrin, C. and Fox, E.B. and Maahs, D.M. and Scheinker D.},
title = {Adding Glycemic and Physical Activity Metrics to a Multimodal Algorithm-Enabled Decision-Support Tool for Type 1 Diabetes Care: Keys to Implementation and Opportunities},
booktitle = {Frontiers in Endocrinology},
year = {2022},
volume = {},
pages = {},
}
Frontiers in Endocrinology
2022
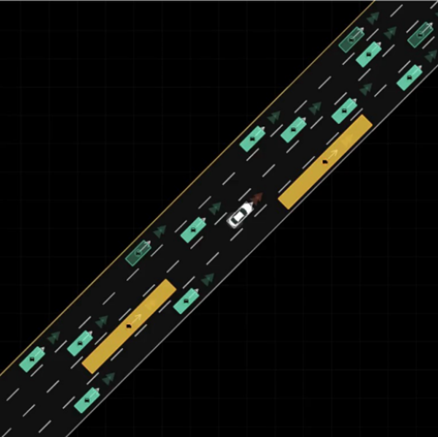
R. Bhattacharyya, B. Wulfe, D. Phillips, A. Kuefler, J.
Morton, R. Senanayake, and M. Kochenderfer
Modeling Human Driving Behavior through Generative
Adversarial Imitation Learning
@inproceedings{Bhattacharyya2020arxiv_jair,
author = {Bhattacharyya, Raunak and Wulfe, Blake and
Phillips, Derek and Kuefler, Alex and Morton, Jeremy and
Senanayake, Ransalu and Kochenderfer, Mykel},
title = {Modeling Human Driving Behavior through
Generative Adversarial Imitation Learning},
booktitle = {IEEE Transactions on Intelligent Transportation Systems (T-ITS)},
year = {2022},
volume = {},
pages = {},
}
IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2022
M. Fernando, R. Senanayake, and M. Swany
CoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware Coverage
@inproceedings{fernando2021arxiv,
author = {Fernando, Malintha and Senanayake, Ransalu and
Swany, Martin},
title = {CoCo Games: Graphical Game-Theoretic Swarm Control for Communication-Aware Coverage},
booktitle = {IEEE Robotics and Automation Letters},
year = {2022},
volume = {},
pages = {},
}
IEEE Robotics and Automation Letters (RA-L), 2022
V.M. Dax, M. Kochenderfer, R. Senanayake, and U. Ibrahim
Infrastructure-Enabled Autonomy: An Attention Mechanism for Occlusion Handling
@inproceedings{Dax2022icra,
author = {Dax, Victoria Magdalena and Kochenderfer, Mykel and
Senanayake, Ransalu and Ibrahim, Umair},
title = {Infrastructure-Enabled Autonomy: An Attention Mechanism for Occlusion Handling},
booktitle = {International Conference on Robotics and Automation (ICRA)},
year = {2022},
volume = {},
pages = {},
}
International Conference on Robotics and Automation (ICRA),
Philadelphia, 2022
L. Kruse, E. Yel, R. Senanayake, and M. Kochenderfer
Uncertainty-Aware Online Merge Planning with Learned Driver Behavior
@inproceedings{Kruse2022arxiv,
author = {Kruse, Liam and Yel, Esen and
and Senanayake, Ransalu and Kochenderfer, Mykel},
title = {Uncertainty-Aware Online Merge Planning with Learned Driver Behavior},
booktitle = {25th IEEE International Conference on Intelligent
Transportation Systems (ITSC)},
year = {2022},
volume = {},
pages = {},
}
The 25th IEEE International Conference on Intelligent
Transportation Systems (ITSC), Macau, 2022
S. Jung, R. Senanayake, and M. Kochenderfer
A Gray Box Model for Characterizing Driver Behavior
@inproceedings{Dax2022icra,
author = {Jung, Soyeon and Senanayake, Ransalu and Kochenderfer, Mykel},
title = {A Gray Box Model for Characterizing Driver Behavior},
booktitle = {SafeAI 2022 at AAAI Conference on Artificial Intelligence (AAAI)},
year = {2022},
volume = {},
pages = {},
}
SafeAI,
Vancouver, 2022
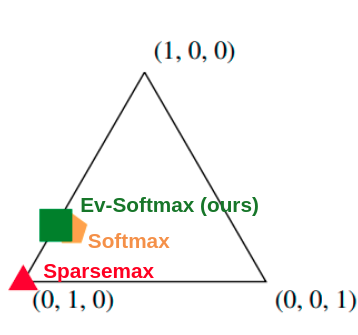
P. Chen, M. Itkina, R. Senanayake, and M. Kochenderfer
Evidential Softmax for Sparse Multimodal Distributions in Deep Generative Models
@inproceedings{Chen2021neurips,
author = {Chen, Phil and Itkina, Masha and
Senanayake, Ransalu and Kochenderfer},
title = {Evidential Softmax for Sparse Multimodal Distributions in Deep Generative Models},
booktitle = {Neural Information Processing Systems
(NeurIPS)},
year = {2021},
volume = {},
pages = {},
}
Neural Information Processing Systems (NeurIPS),
Sydney, 2021
R. Bhattacharyya, S. Jung, L. Kruse, R. Senanayake, and M. Kochenderfer
A Hybrid Rule-Based and Data-Driven Approach to Driver Modeling through Particle Filtering
@inproceedings{Bhattacharyya2021arxiv_tits,
author = {Bhattacharyya, Raunak and Jung, Soyeon and
Kruse, Liam and and
Senanayake, Ransalu and Kochenderfer, Mykel},
title = {A Hybrid Rule-Based and Data-Driven Approach to Driver Modeling through Particle Filtering},
booktitle = {IEEE Transactions on Intelligent Transportation Systems (T-ITS)},
year = {2021},
volume = {},
pages = {},
}
IEEE Transactions on Intelligent Transportation Systems (T-ITS),
2021
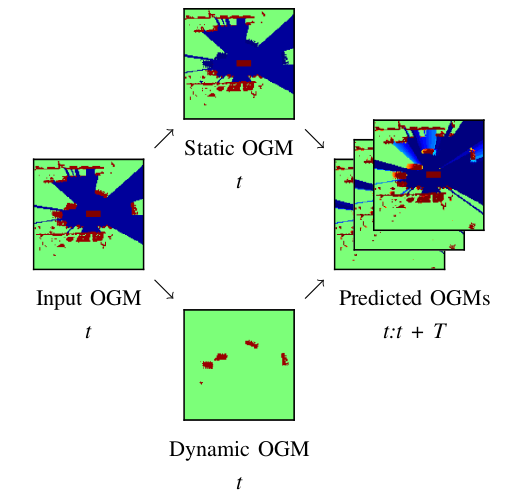
M. Toyungyernsub, M. Itkina, R. Senanayake, and M.
Kochenderfer
Double-Prong ConvLSTM for Spatiotemporal Occupancy
Prediction in Dynamic Environments
@inproceedings{Toyungyernsub2020arxiv,
author = {Toyungyernsub, Maneekwan and Itkina, Masha and
Senanayake, Ransalu and Kochenderfer, Mykel},
title = {Double-Prong ConvLSTM for Spatiotemporal
Occupancy Prediction in Dynamic Environments},
booktitle = {arXiv:2011.09045},
year = {2020},
volume = {},
pages = {},
}
IEEE The International Conference on Robotics and Automation
(ICRA), Xi'an, 2021
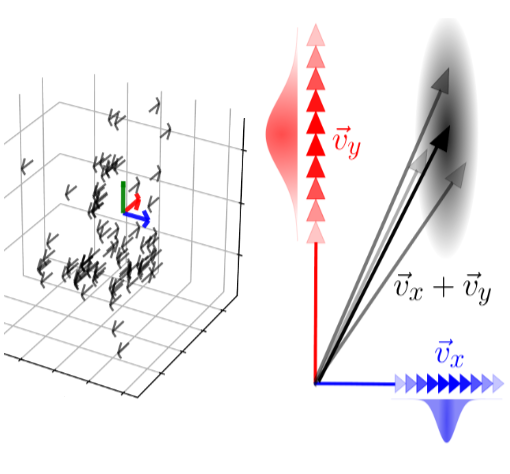
R. Senanayake*, K.B. Hatch*, J. Zheng, and M. Kochenderfer
3D Radar Velocity Maps for Uncertain Dynamic Environments
@inproceedings{senanayake2021bdf,
author = {Senanayake, Ransalu Hatch, Kyle Beltran and Zheng, Jason and Kochenderfer, Mykel J.},
title = {3D Radar Velocity Maps for Uncertain Dynamic Environmentss},
booktitle = {2021 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS)},
year = {2021},
organization={IEEE},
pages = {},
}
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Prague, 2021
J. Nitsch, M. Itkina, R. Senanayake, J. Nieto, M. Schmidt,
R. Siegwart, M. Kochenderfer, C. Cadena
Out-of-Distribution Detection for Automotive Perception
@inproceedings{Nitsch,
author = {Nitsch, Julia and Itkina, Masha and
Senanayake, Ransalu and Nieto, Juan and Schmidt, Max and
Siegwart, Roland and Kochenderfer, Mykel J. and Cadena,
Cesar},
title = {Out-of-Distribution Detection for Automotive
Perception},
booktitle = {24th IEEE International Conference on Intelligent
Transportation Systems (ITSC)},
year = {2021},
volume = {},
pages = {},
}
The 24th IEEE International Conference on Intelligent
Transportation Systems (ITSC), Indianapolis, 2021
M. Itkina, B. Ivanovich, R. Senanayake, M. Kochenderfer, and
M. Pavone
Evidential Sparsification of Multimodal Latent Spaces in
Conditional Variational Autoencoders
@inproceedings{Itkina2020neurips,
author = {Itkina, Masha and Ivanovic, Boris and
Senanayake, Ransalu and Kochenderfer, Mykel and Pavone,
Marco},
title = {Evidential Sparsification of Multimodal Latent
Spaces in Conditional Variational Autoencoders},
booktitle = {Neural Information Processing Systems
(NeurIPS)},
year = {2020},
volume = {},
pages = {},
}
Neural Information Processing Systems (NeurIPS),
Vancouver, 2020
A. Tompkins*, R. Senanayake*, and F. Ramos
Online Domain Adaptation for Occupancy Mapping
@inproceedings{Tompkins2020rss,
author = {Tompkins, Anthony and Senanayake, Ransalu and
Ramos, Fabio},
title = {Online Domain Adaptation for Occupancy
Mapping},
booktitle = {Robotics: Science and Systems (R:SS)},
year = {2020},
volume = {},
pages = {},
}
Robotics: Science and Systems (RSS) Conference,
Corvallis, 2020
R. Bhattacharyya, R. Senanayake, K. Brown, and M.
Kochenderfer
Online Parameter Estimation for Human Driver Behavior
Prediction
@inproceedings{Bhattacharyya2020,
author = {Bhattacharyya, Raunak and Senanayake, Ransalu
and Brown, Kyle and Kochenderfer, Mykel J.},
title = {Online Parameter Estimation for Human Driver
Behavior Prediction},
booktitle = {IEEE American Control Conference (ACC)},
year = {2020},
volume = {},
pages = {},
}
IEEE American Control Conference (ACC), Denver,
2020
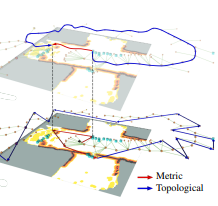
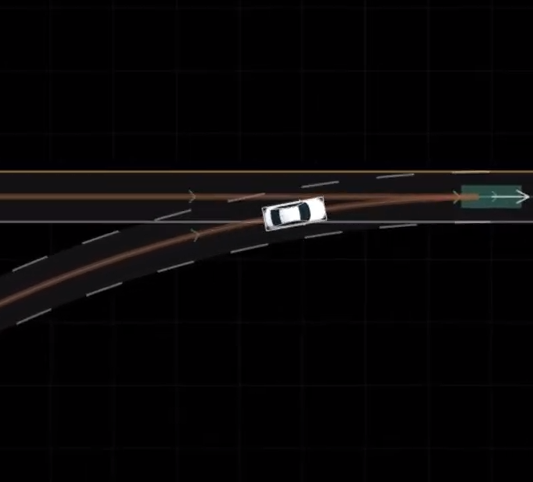
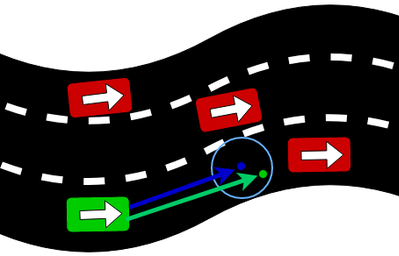
R. Senanayake, M. Toyungyernsub, M. Wang, M.J. Kochenderfer,
and M. Schwager
Directional Primitives for Uncertainty-Aware Motion
Estimation in Urban Environments
@inproceedings{Senanayake2020itsc,
author = {Senanayake, Ransalu and Toyungyernsub,
Maneekwan and Wang, Mingyu and Kochenderfer, Mykel J.
and Schwager, Mac},
title = {Directional Primitives for Uncertainty-Aware
Motion Estimation in Urban Environments},
booktitle = {IEEE International Conference on
Intelligent Transportation Systems (ITSC)},
year = {2020},
volume = {},
pages = {},
}
The 23rd IEEE International Conference on Intelligent
Transportation Systems (ITSC), Greece, 2020
W. Zhi, R. Senanayake, L. Ott, and F. Ramos
Spatiotemporal Learning of Directional Uncertainty in Urban
Environments with Kernel Recurrent Mixture Density Networks
@Article{zhi2019spatiotemporal,
author = {Zhi, Weiming and Senanayake, Ransalu and Ott,
Lionel and Ramos, Fabio},
title = {Spatiotemporal learning of directional
uncertainty in urban environments with kernel recurrent
mixture density networks},
journal = {IEEE Robotics and Automation Letters},
year = {2019},
volume = {4},
number = {4},
pages = {4306--4313},
publisher={IEEE},
}
IEEE Robotics and Automation Letters (RA-L),
2019 and IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Macao, 2019
V. Guizilini, R. Senanayake, and F. Ramos
Dynamic Hilbert Maps: Real-Time Occupancy Predictions in
Changing Environments
@inproceedings{guizilini2019dynamic,
author = {Guizilini, Vitor and Senanayake, Ransalu and
Ramos, Fabio},
title = {Dynamic Hilbert Maps: Real-Time Occupancy
Predictions in Changing Environments},
booktitle = {2019 International Conference on Robotics
and Automation (ICRA)},
year = {2019},
pages = {4091--4097},
organization = {IEEE},
}
IEEE The International Conference on Robotics and Automation
(ICRA), Montreal, 2019
W. Zhi, L. Ott, R. Senanayake, F. Ramos
Continuous Occupancy Map Fusion with Fast Bayesian Hilbert
Maps
@inproceedings{zhi2019continuous,
author = {Zhi, Weiming and Ott, Lionel and Senanayake,
Ransalu and Ramos, Fabio},
title = {Continuous Occupancy Map Fusion with Fast
Bayesian Hilbert Maps},
booktitle = {2019 International Conference on Robotics
and Automation (ICRA)},
year = {2019},
organization = {IEEE},
pages = {4111--4117},
}
IEEE The International Conference on Robotics and Automation
(ICRA), Montreal, 2019
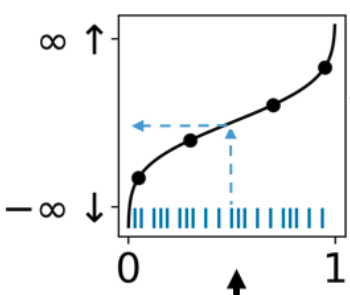
A. Tompkins*, R. Senanayake*, P. Morere*, F. Ramos
Black-box Quantiles for Kernel Learning
@inproceedings{tompkins2019black,
author = {Tompkins, Anthony and Senanayake, Ransalu and
Morere, Philippe and Ramos, Fabio},
title = {Black Box Quantiles for Kernel Learning},
booktitle = {The 22nd International Conference on
Artificial Intelligence and Statistics},
year = {2019},
pages = {1427--1437},
}
The 22nd International Conference on Artificial Intelligence
and Statistics (AISTATS), Okinawa, 2019
T. Vintr et al.
Time-Varying Pedestrian Flow Models for Service Robots
@inproceedings{vintr2019time,
author = {Vintr, Tom{\'a}{\v{s}} and Molina, Sergi and
Senanayake, Ransalu and Broughton, George and Yan, Zhi
and Ulrich, Ji{\v{r}}{\'\i} and Kucner, Tomasz Piotr and
Swaminathan, Chittaranjan Srinivas and Majer, Filip and
Stachov{\'a}, M{\'a}ria and others},
title = {Time-varying pedestrian flow models for service
robots},
booktitle = {2019 European Conference on Mobile Robots
(ECMR)},
year = {2019},
organization={IEEE},
pages = {1--7},
}
The 9th European Conference on Mobile Robotics (ECMR),
Prague, 2019
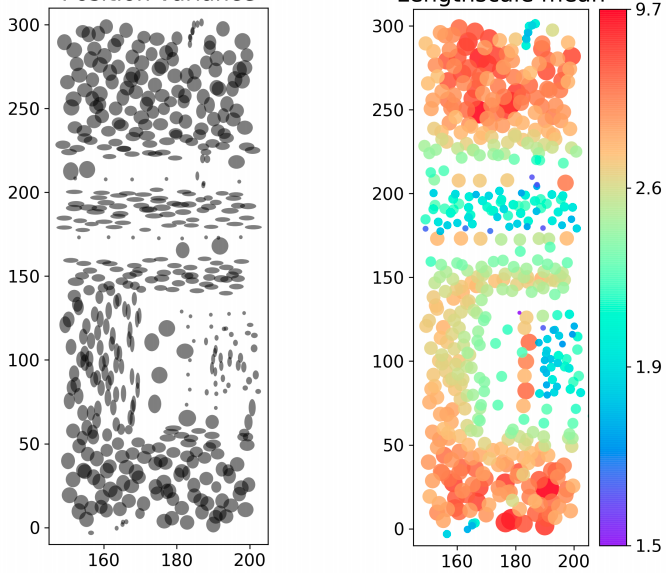
R. Senanayake*, A. Tompkins*, and F. Ramos
Automorphing Kernels for Nonstationarity in Mapping
Unstructured Environments
@inproceedings{senanayake2018automorphing,
author = {Senanayake, Ransalu and Tompkins, Anthony and
Ramos, Fabio},
title = {Automorphing Kernels for Nonstationarity in
Mapping Unstructured Environments},
booktitle = {Conference on Robot Learning (CoRL)},
year = {2018},
pages = {443--455},
}
Annual Conference on Robot Learning (CoRL), Zurich,
2018
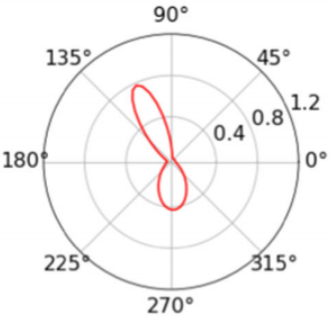
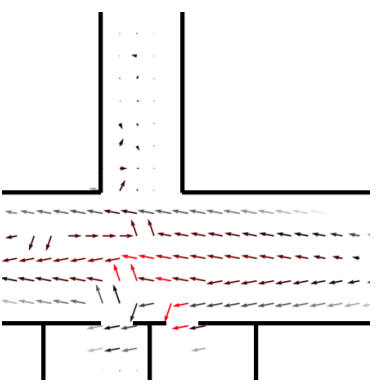
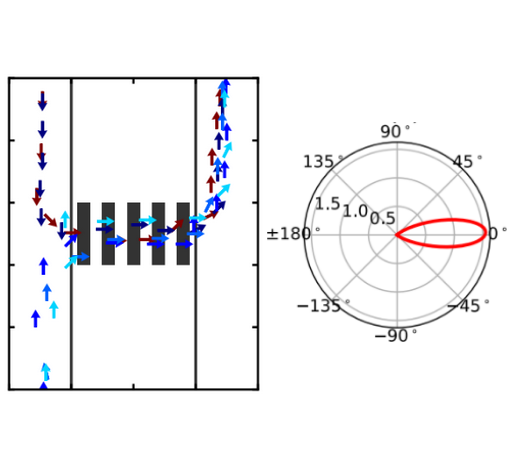
R. Senanayake and F. Ramos
Directional Grid Maps: Modeling Multimodal Angular
Uncertainty in Dynamic Environments
@inproceedings{senanayake2018directional,
author = {Senanayake, Ransalu and Ramos, Fabio},
title = {Directional grid maps: modeling multimodal
angular uncertainty in dynamic environments},
booktitle = {2018 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS)},
year = {2018},
organization={IEEE},
pages = {3241--3248},
}
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), Madrid, 2018
R. Senanayake and F. Ramos
Building Continuous Occupancy Mapping with Moving Robots
@inproceedings{senanayake2018building,
author = {Senanayake, Ransalu and Ramos, Fabio},
title = {Building continuous occupancy maps with moving
robots},
booktitle = {Thirty-Second AAAI Conference on Artificial
Intelligence (AAAI)},
year = {2018},
pages = {105--124},
}
32nd AAAI Conference on Artificial Intelligence (AAAI),
New Orleans, 2018
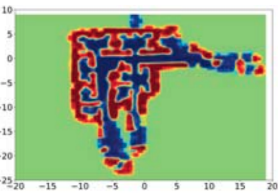
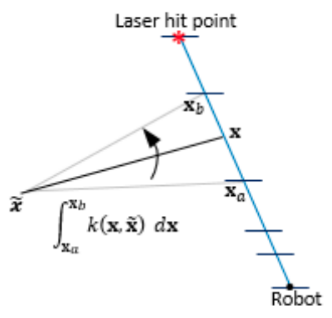
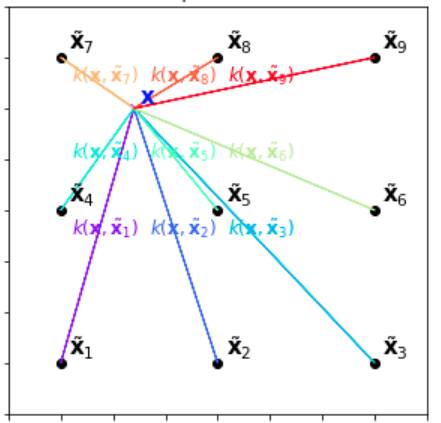
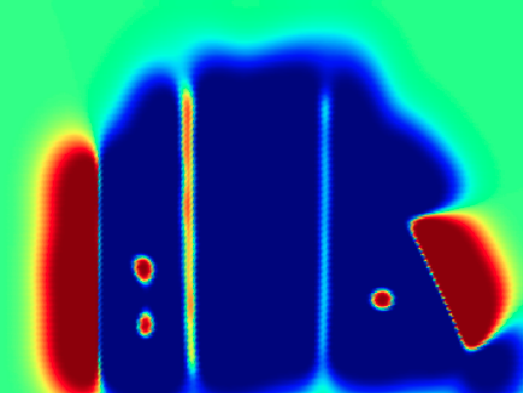
R. Senanayake and F. Ramos
Bayesian Hilbert Maps for Dynamic Continuous Occupancy
Mapping
@inproceedings{senanayake2017bayesian,
author = {Senanayake, Ransalu and Ramos, Fabio},
title = {Bayesian hilbert maps for dynamic continuous
occupancy mapping},
booktitle = {Conference on Robot Learning},
year = {2017},
pages = {458--471},
}
Annual Conference on Robot Learning (CoRL), Mountain
View, 2017
R. Senanayake, S. O'Callaghan, and F. Ramos
Learning Highly Dynamic Environments with Stochastic
Variational Inference
@inproceedings{senanayake2017learning,
author = {Senanayake, Ransalu and O'Callaghan, Simon and
Ramos, Fabio},
title = {Learning highly dynamic environments with
stochastic variational inference},
booktitle = {2017 IEEE International Conference on
Robotics and Automation (ICRA)},
year = {2017},
organization = {IEEE},
pages = {2532--2539},
}
The International Conference on Robotics and Automation (ICRA),
Singapore, 2017
R. Senanayake, L. Ott, S. O'Callaghan, and F. Ramos
Spatio-Temporal Hilbert Maps for Continuous Occupancy
Representation in Dynamic Environment
@inproceedings{senanayake2016spatio,
author = {Senanayake, Ransalu and Ott, Lionel and
O'Callaghan, Simon and Ramos, Fabio T},
title = {Spatio-temporal hilbert maps for continuous
occupancy representation in dynamic environments},
booktitle = {Advances in Neural Information Processing
Systems},
year = {2016},
pages = {3925--3933},
}
30th Annual Conference on Neural Information Processing
Systems (NeurIPS), Barcelona, 2016
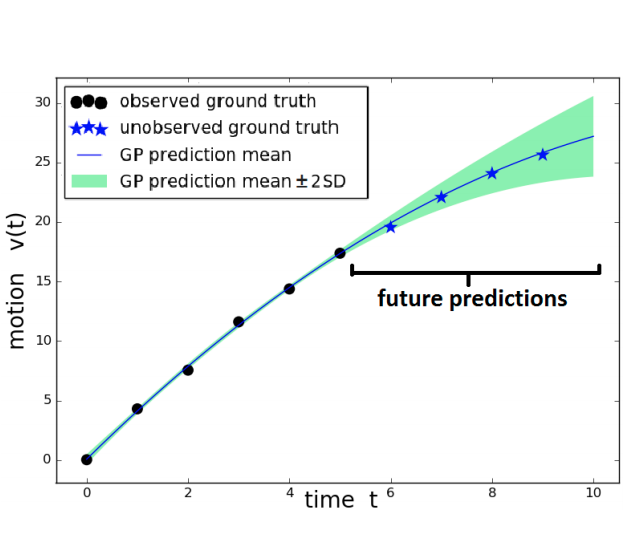
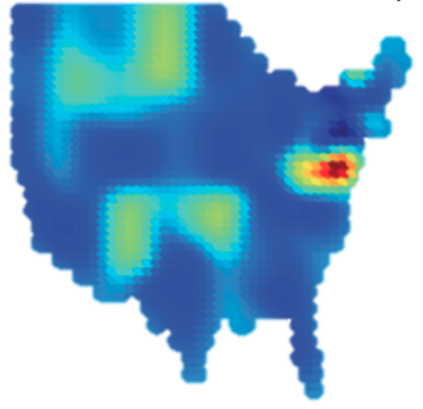
R. Senanayake, S. O'Callaghan, and F. Ramos
Predicting Spatio‐Temporal Propagation of Seasonal Influenza
using Variational Gaussian Process Regression
@inproceedings{senanayake2016predicting,
author = {Senanayake, Ransalu and O'Callaghan, Simon and
Ramos, Fabio},
title = {Predicting spatio-temporal propagation of
seasonal influenza using variational Gaussian process
regression},
booktitle = {Thirtieth AAAI Conference on Artificial
Intelligence (AAAI)},
year = {2016},
pages = {},
}
30th AAAI Conference on Artificial Intelligence (AAAI),
Phoenix, 2016
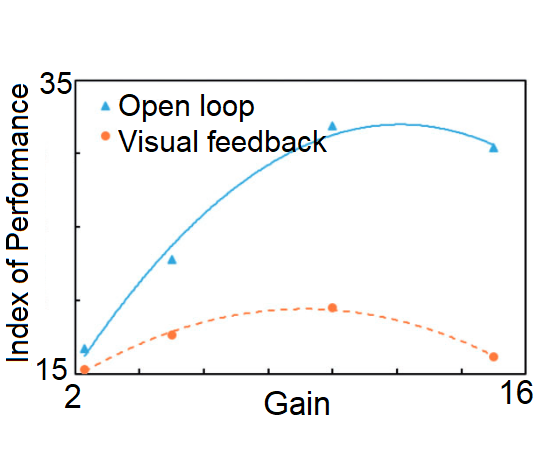
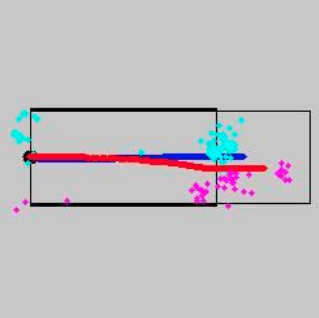
R. Senanayake and R. Goonetilleke
Pointing device performance in steering tasks
@Article{senanayake2016pointing,
author = {Senanayake, Ransalu and Goonetilleke, Ravindra
S},
title = {Pointing device performance in steering tasks},
journal = {Perceptual and motor skills},
year = {2016},
volume = {122},
number = {3},
pages = {886--910},
}
Perceptual and Motor Skills, 2016
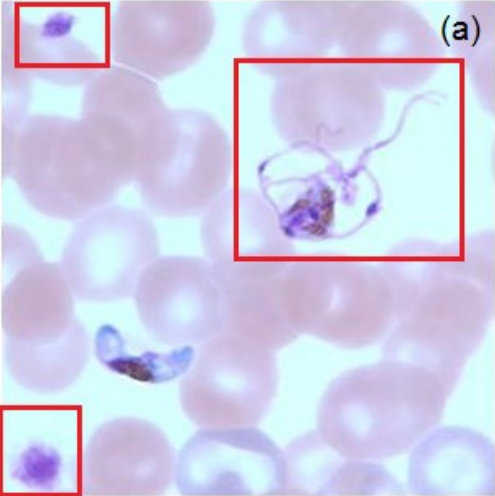
A. Ravendran, R. de Silva, and R. Senanayake
Moment Invariant Features for Automatic Identification of
Critical Malaria Parasites
@inproceedings{ravendran2015moment,
author = {Ravendran, Ahalya and de Silva, KWT Roshali T
and Senanayake, Ransalu},
title = {Moment invariant features for automatic
identification of critical malaria parasites},
booktitle = {2015 IEEE 10th International Conference on
Industrial and Information Systems (ICIIS)},
year = {2015},
organization={IEEE},
pages = {474--479},
}
10th IEEE International Conference on Industrial and
Information Systems, Peradeniya, 2015
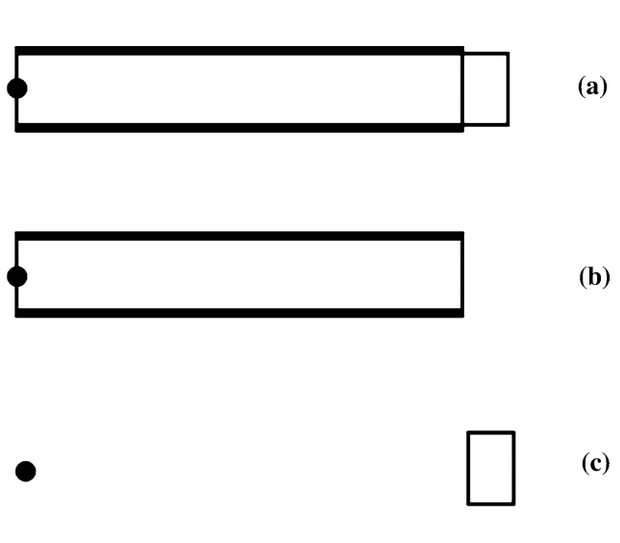
R. Senanayake and R. Goonetilleke
Targeted-Tracking With Pointing Devices
@Article{senanayake2015targeted,
author = {Senanayake, Ransalu and Goonetilleke, Ravindra
S and Hoffmann, Errol R},
title = {Targeted-tracking with pointing devices},
booktitle = {IEEE Transactions on Human-Machine
Systems},
year = {2015},
volume = {45},
number = {4},
pages = {431--441},
}
IEEE Transactions on Human-Machine Systems, 2015
R. Senanayake, E. Hoffmann, and R. Goonetilleke
A Model for Combined Targeting and Tracking Tasks in
Computer Applications
@Article{senanayake2013model,
author = {Senanayake, Ransalu and Hoffmann, Errol R and
Goonetilleke, Ravindra S},
title = {A model for combined targeting and tracking
tasks in computer applications},
journal = {Experimental brain research},
year = {2013},
volume = {231},
number = {3},
pages = {367--379},
publisher = {Springer},
}
Experimental Brain Research, 2013
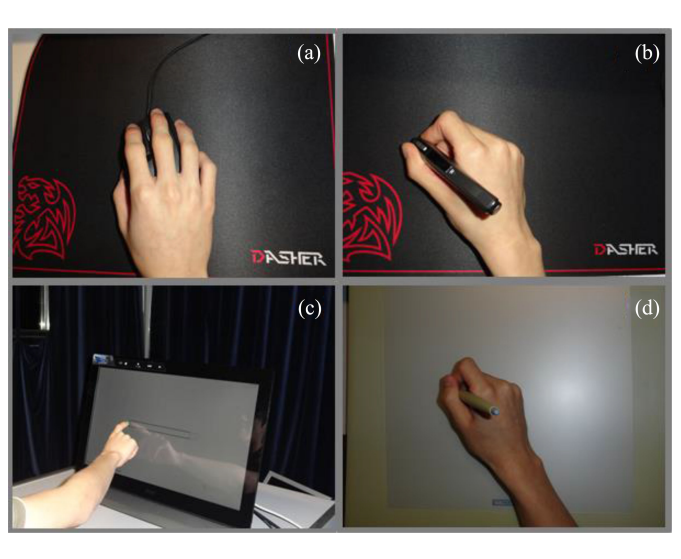
R. Senanayake and R. Goonetilleke
Superiority of Freehand Pointing
@inproceedings{senanayake2013superiority,
author = {Senanayake, Ransalu and Goonetilleke, Ravindra
S},
title = {Superiority of freehand pointing},
booktitle = {Proceedings of the Human Factors and
Ergonomics Society Annual Meeting},
year = {2013},
volume = {57},
number = {1},
pages = {1639--1642},
organization={SAGE Publications Sage CA: Los Angeles,
CA},
}
57th Annual Meeting of the Human Factors and Ergonomic
Society (HFES), San Diego, 2013
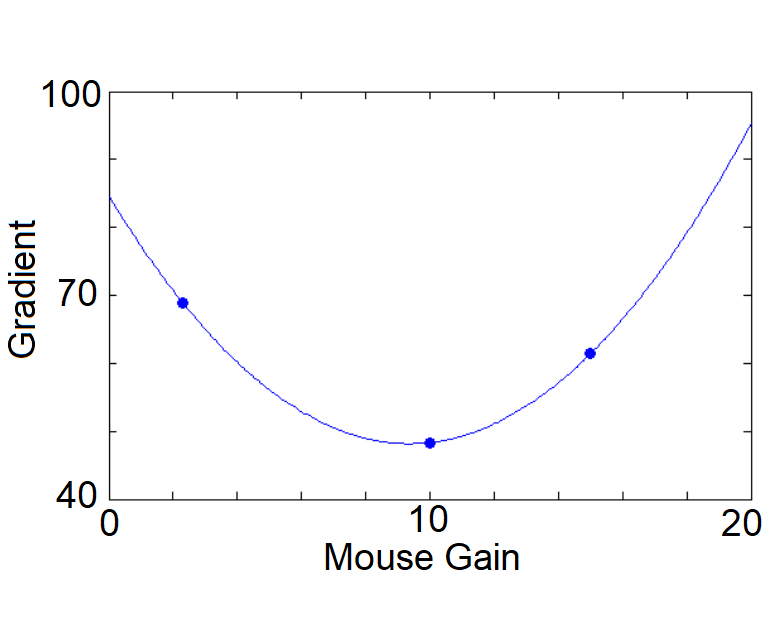
R. Senanayake and R. Goonetilleke
Setting that Mouse for Tracking Tasks
@inproceedings{senanayake2013setting,
author = {Senanayake, Ransalu and Goonetilleke, Ravindra
S},
title = {Setting that mouse for tracking tasks},
booktitle = {International Conference on Digital Human
Modeling and Applications in Health, Safety, Ergonomics
and Risk Management},
year = {2013},
organization = {Springer},
pages = {276--281},
}
15th International Conference on Human-Computer Interaction
(HCII), Las Vegas, 2013
A. de Silva, M, Wijesundara, and R. Senanayake
Computer Controlled Digital Microscope with Photomicrograph
Enhancement
@inproceedings{silva2013computer,
author = {Silva, Agampodi Dumindu N and Wijesundara,
Malitha N and Senanayake, Ransalu},
title = {Computer controlled digital microscope with
photomicrograph enhancement},
booktitle = {2013 International Conference of
Information and Communication Technology (ICoICT)},
year = {2013},
organization = {IEEE},
pages = {44--47},
}
Proceedings of the IEEE International Conference on
Information and Communication Technology, Bandung, 2013
R. Senanayake and S. Kumarawadu
A Robust Vision-based Hand Gesture Recognition System for
Appliance Control in Smart Homes
@inproceedings{senanayake2012robust,
author = {Senanayake, Ransalu and Kumarawadu, Sisil},
title = {A robust vision-based hand gesture recognition
system for appliance control in smart homes},
booktitle = {2012 IEEE International Conference on
Signal Processing, Communication and Computing (ICSPCC
2012)},
year = {2012},
organization = {IEEE},
pages = {760--763},
}
IEEE International Conference on Signal Processing,
Communications and Computing, Hong Kong, 2012
Authors
Title
Conference/Journal
Illustration
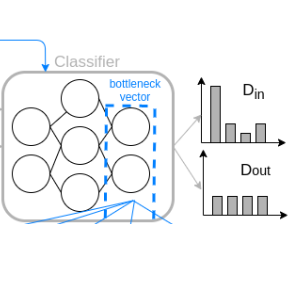
A. Uwimana and R. Senanayake
Out of Distribution Detection and Adversarial Attacks on Deep Neural Networks for Robust Medical Image Analysis
@Article{uwimana2021icml,
author = {Uwimana, Anisie and Senanayake, Ransalu},
title = {Out of Distribution Detection and Adversarial Attacks on Deep Neural Networks for Robust Medical Image Analysis},
journal = {Workshop on A Blessing in Disguise:The Prospects and Perils of Adversarial Machine Learning at the 38th International Conference on Machine Learning},
year = {2021},
volume = {},
pages = {},
}
Workshop on A Blessing in Disguise:The Prospects and Perils of Adversarial Machine Learning at the 38th International Conference on Machine Learning
(ICML-AdvML), Virtual, 2021
M. Itkina, B. Ivanovic, R. Senanayake, M. Kochenderfer,
and M. Pavone
Evidential Disambiguation of Latent Multimodality in
Conditional Variational Autoencoders
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Bayesian Deep Learning at the 33rd Annual
Conference on Neural Information Processing Systems
(NeurIPS-BDL), Vancouver, 2019
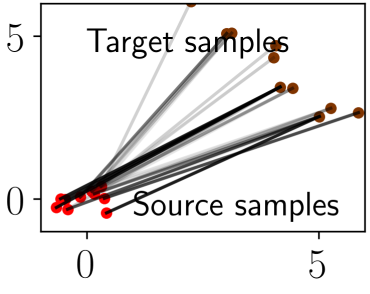
A. Tompkins, R. Senanayake, and F. Ramos
Parameter Optimal Transport for Robotic Mapping
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Optimal Transport for Machine Learning at the
33rd Annual Conference on Neural Information Processing
Systems (NeurIPS-OTML), Vancouver, 2019
R. Senanayake, M. Toyungyernsub, M. Wang, M. Kochenderfer,
and M. Schwager
Directional Primitives for Uncertainty-Aware Motion
Prediction in Urban Environments
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Scene and Situation Understanding for
Autonomous Driving at the Robotics: Science and Systems
(R:SS-UAD), Germany, 2019
Tomas Vintr, et al.
Spatio-temporal Representation of Time-varying Pedestrian
Flows
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Long-term Human Motion Prediction at the
International Conference on Robotics and Automation
(ICRA-LHMP), Montreal, 2019
W. Zhi, R. Senanayake, L. Ott, and F. Ramos
Spatiotemporal Learning of Directional Uncertainty in
Urban Environments
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Long-term Human Motion Prediction at the
International Conference on Robotics and Automation
(ICRA-LHMP), Montreal, 2019
A. Tompkins, R. Senanayake, and F. Ramos
Gray-box probabilistic occupancy mapping
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Machine Learning for Intelligent
Transportation Systems at the 32nd Annual Conference on
Neural Information Processing Systems (NeurIPS-MLITS),
Montreal, 2019
R. Senanayake and F. Ramos
Probabilistic Dynamic Maps for Path Planning
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Robotics: Science and Systems (R:SS) Pioneers, Pittsburgh,
2018
R. Senanayake, T. Ganegedara, and F. Ramos
Deep Occupancy Maps: a continuous occupancy mapping
technique for dynamic environments
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Machine Learning for Intelligent
Transportation Systems at the 31st Annual Conference on
Neural Information Processing Systems (NIPS-MLITS), Long
Beach, 2017
R. Senanayake and F. Ramos
Bayesian Hilbert Maps for Continuous Occupancy Mapping in
Dynamic Environments
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Machine Learning for Autonomous Vehicles at
the 34th International Conference on Machine Learning
(ICML-MLAV), Sydney, 2017
R. Senanayake, S. O'Callaghan, and F. Ramos
Mapping Occupancy of Dynamic Environments using Big Data
Gaussian Process Classification
@Article{Carlberg2019,
author = {},
title = {},
journal = {},
year = {2019},
volume = {},
pages = {105--124},
}
Workshop on Machine Learning for Intelligent
Transportation Systems at the 30th Annual Conference on
Neural Information Processing Systems (NIPS-MLITS),
Barcelona, 2016